Mechanical Designs
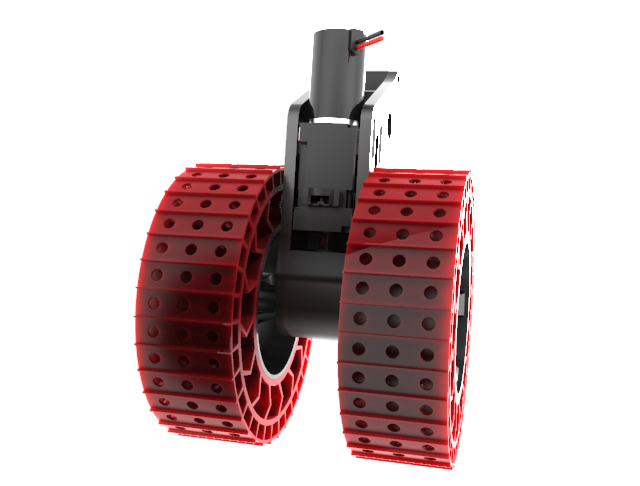
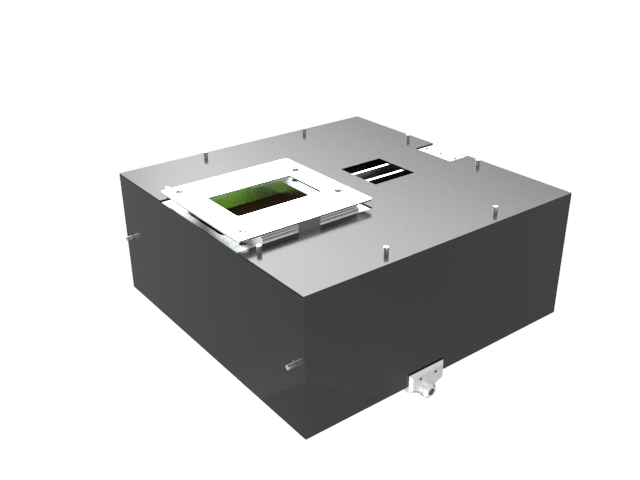
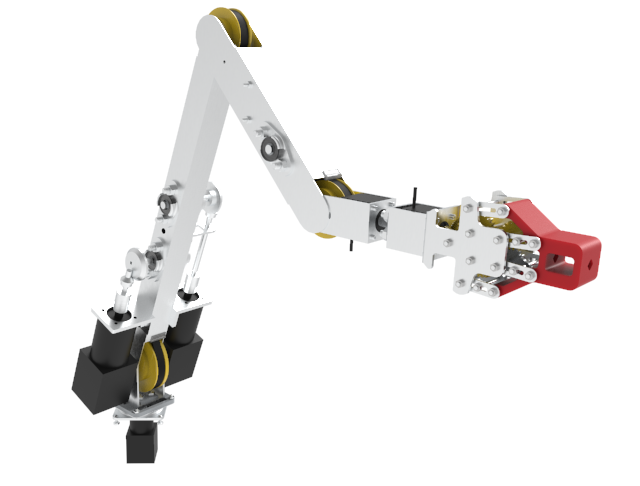
The Canadian rover community relies on collaborative learning, and MMRT is no different! Here, you can find examples of our team's CAD renders on Fusion360's platform. You can watch our team's design progress and learn about the different parts!
Click on any of the images to view the CAD