Electrical Designs
|
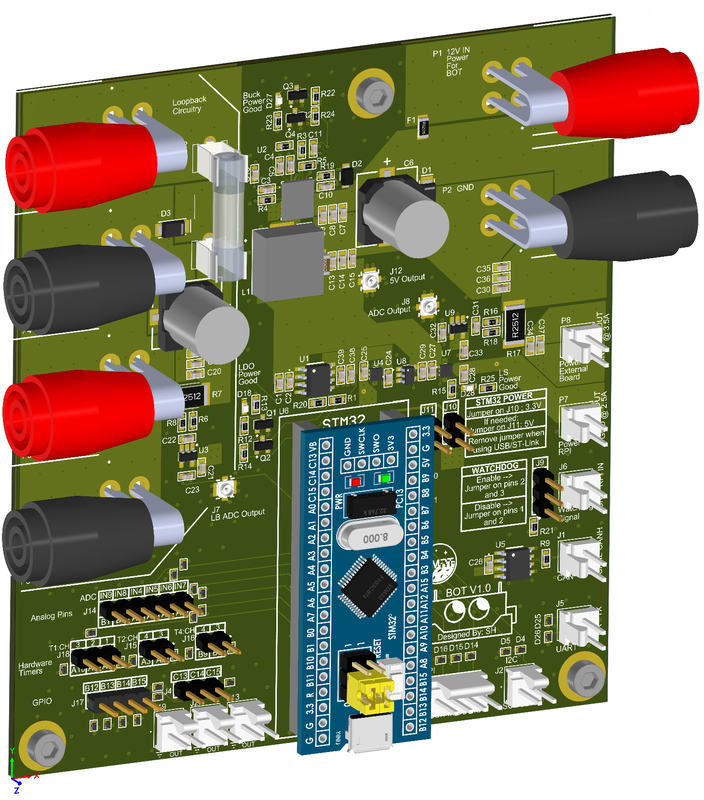
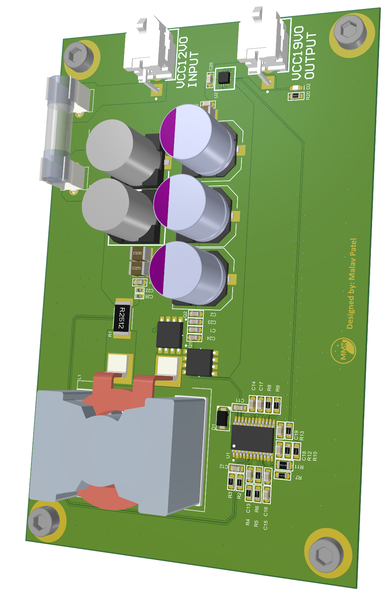
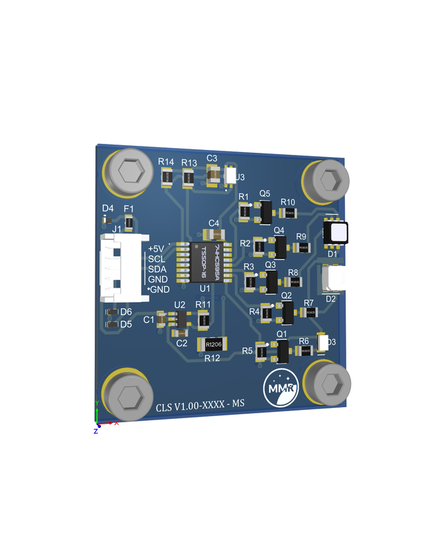
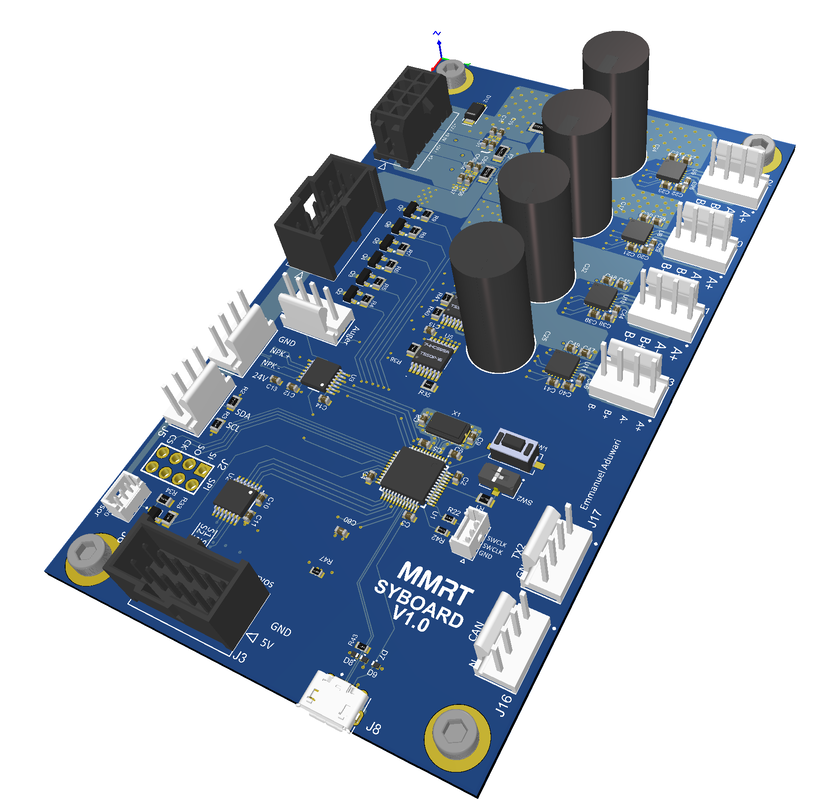
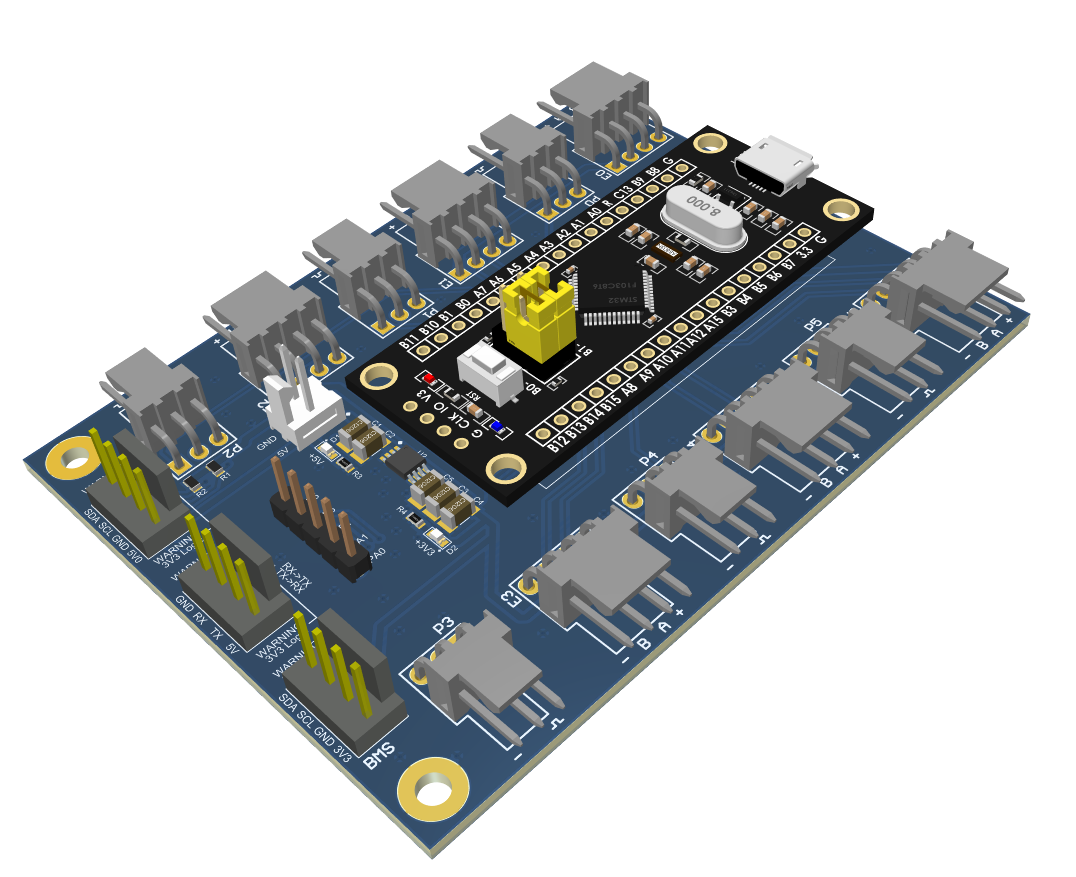
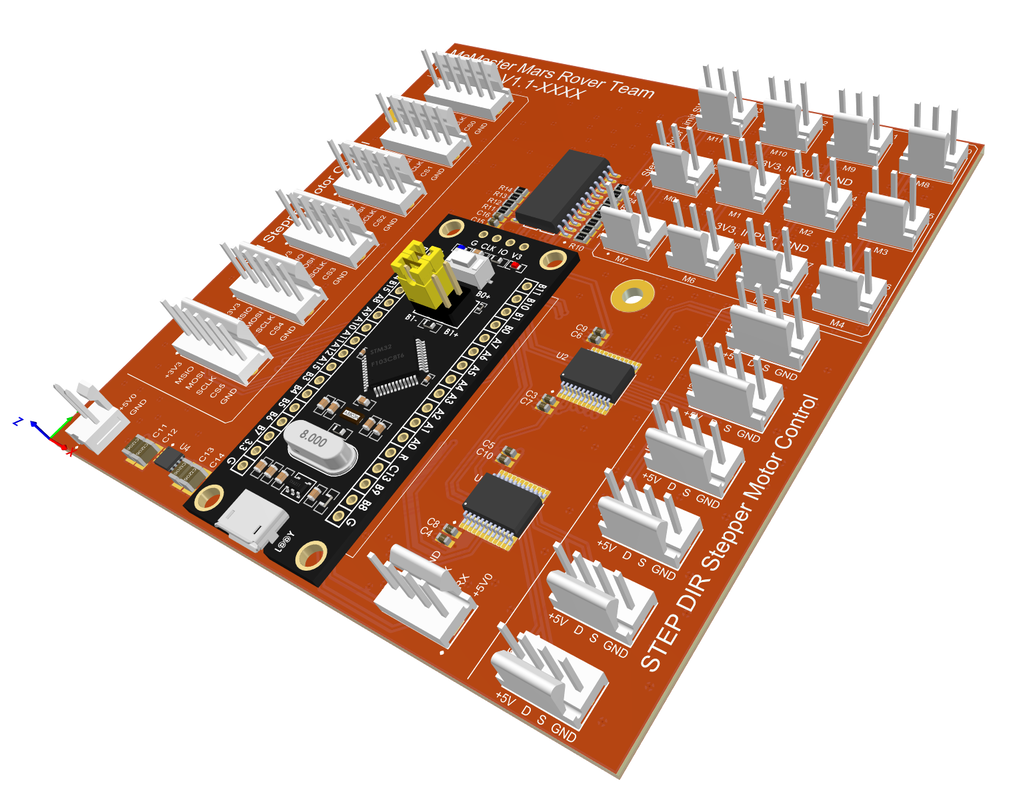
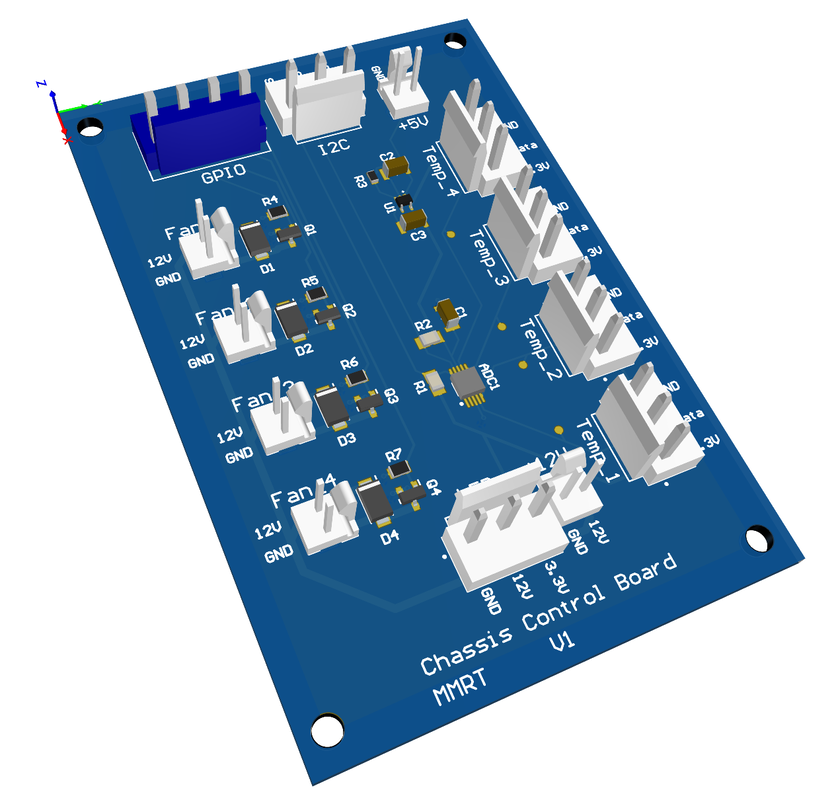
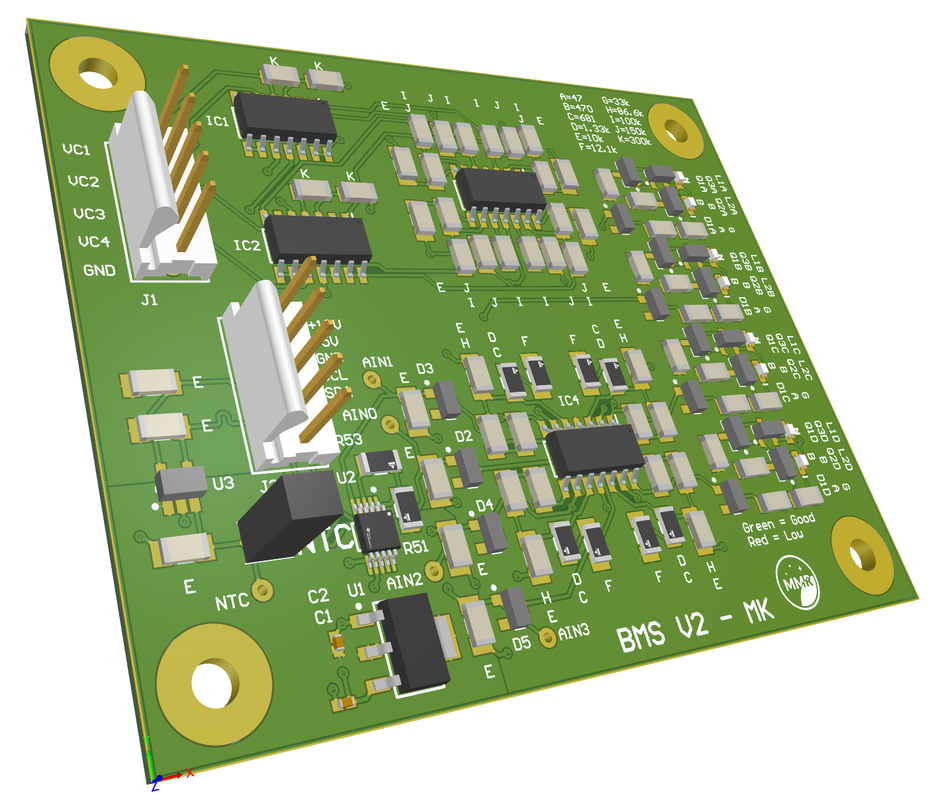
This year we have made our own custom PCBs which are able to power and control various parts of the rover. Our designs consist our Boost converters able to power the Jetson TX2, motors and able to control our arm, drive motors and science modules!
Check our website for updates we will be doing and more boards that we have manufactured! |

|
Check out our designs below!
Updates to existing boards and new board designs will be released every few months.
Check out our Github to browse through our released boards.
Check out our Github to browse through our released boards.